
Section 1.22 Lines and Planes
Two points \(A\) and \(B\) determine a line. But there are also other ways to describe a line. Rather than specifying two points, we can specify just one (\(A\)), then give a vector \(\vv\) along the line.
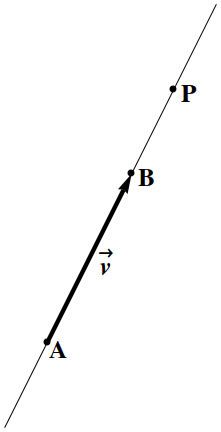
So let \(\AA\) be the vector from the origin to the point \(A\text{,}\) and \(\vv\) be a vector from \(A\) that points along the line. Then any other point \(P\) on the line can be reached by going to \(A\) along \(\AA\text{,}\) then going along \(\vv\text{.}\) Thus, the vector
\begin{equation}
\rr(u) = \AA + \vv\,u\tag{1.22.1}
\end{equation}
from the origin to \(P\) provides a vector parameterization of the line. Equivalently, if
\begin{align*}
\AA \amp = a_x\,\xhat + a_y\,\yhat + a_z\,\zhat ,\\
\vv \amp = v_x\,\xhat + v_y\,\yhat + v_z\,\zhat ,
\end{align*}
then the line is given by the parametric equations
\begin{align*}
x \amp = a_x + v_x\,u ,\\
y \amp = a_y + v_y\,u ,\\
z \amp = a_z + v_z\,u ,
\end{align*}
which gives the coordinates \((x,y,z)\) of the point \(P\) in terms of the parameter \(u\text{.}\) A given line can have many parameterizations, depending not only on the choice of the point \(A\) on the line and vector \(\vv\) along the line, but also on the choice of parameter \(u\text{.}\)
How do two points determine a line? Using vector addition, you can think of \(\vv\) as \(\BB-\AA\text{,}\) and use the vector description above, as shown in Figure 1.30.
It takes three points \(A\text{,}\) \(B\text{,}\) \(C\) to determine a plane, but again there are also other descriptions. The orientation of a line is given by a vector \(\vv\) along the line. By contrast, the orientation of a plane is given by a vector \(\ww\) perpendicular to the plane. A plane can therefore be specified by giving a point \(A\) and a normal vector \(\ww\) to the plane at the point \(A\text{.}\)
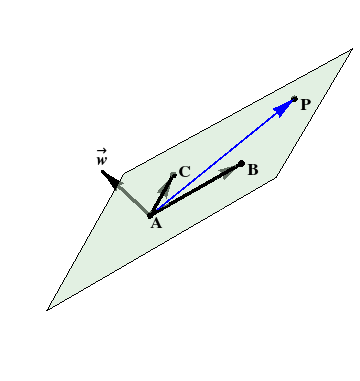
If \(\rr\) is the vector from the origin to \(P\text{,}\) then \(\rr-\AA\) is a vector in the plane, as shown in Figure 1.31. If \(\ww\) is perpendicular to the plane, then it must be perpendicular to any vector in the plane. In particular, it must be perpendicular to \(\rr-\AA\text{,}\) so that
\begin{equation}
(\rr-\AA) \cdot \ww = 0\tag{1.22.2}
\end{equation}
or equivalently
\begin{equation}
\rr \cdot \ww = \AA\cdot\ww .\tag{1.22.3}
\end{equation}
Inserting the components
\begin{align*}
\rr \amp = x\,\xhat + y\,\yhat + z\,\zhat ,\\
\ww \amp = w_x\,\xhat + w_y\,\yhat + w_z\,\zhat ,
\end{align*}
and setting
\begin{equation}
d = \AA\cdot\ww = \hbox{constant}\tag{1.22.4}
\end{equation}
leads to
\begin{equation}
w_x x + w_y y + w_z z = d = w_x a_x + w_y a_y + w_z a_z\tag{1.22.5}
\end{equation}
for the equation of the plane through \(A\) with normal direction \(\ww\text{.}\) This equation should look familiar! Note that the constant coefficients of this linear equation are precisely the components of the normal vector!
How do three points determine a plane? Using vector addition, you can construct two vectors in the plane, such as \(\BB-\AA\) and \(\CCv-\AA\text{.}\) The cross product of these vectors is perpendicular to the plane! Thus, set \(\ww=(\BB-\AA)\times(\CCv-\AA)\text{,}\) and use the vector description above, as shown in Figure 1.31.
