Activity 1.4. Curvilinear Basis Vectors.
Imagine that the origin of coordinates is behind you in the corner of the room you are sitting in, on the floor, on the left-hand side. Think of your right shoulder as a point in space. You should use your right arm to represent, successively, each of the basis vectors \(\xhat\text{,}\) \(\yhat\text{,}\) and \(\zhat\) in rectangular coordinates, \(\shat\text{,}\) \(\phat\text{,}\) and \(\zhat\) in cylindrical coordinates and \(\rhat\text{,}\) \(\that\text{,}\) and \(\phat\) in spherical coordinates.
Hint.

In this activity, you should have learned the following things.
- Figure 1.18 shows the directions that you should have pointed if you were standing at a particular position in the room. Make sure that the directions in which you pointed agree with the directions shown in the figure. In particular, \(\that\) should point generally downward (for \(z>0\)) since \(\theta\) is measured from the positive \(z\)-axis.
- The basis vectors are vectors, that is, they are straight arrows in space, even when they correspond to coordinates that are angles. Your arm should therefore have been straight, no matter which basis vector you were representing.
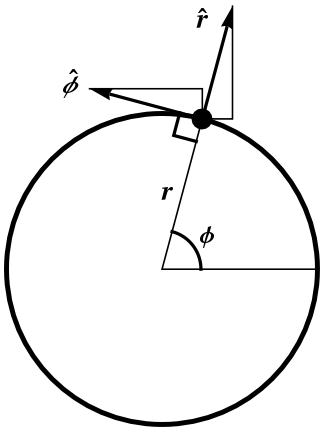
- Although the basis vectors that correspond to rectangular coordinates \(x\text{,}\) \(y\text{,}\) and \(z\) are constants, and point in the same direction at each point in space, most of the basis vectors that correspond to cylindrical and spherical coordinates point in different directions at different points in space. Figure 1.19 shows the construction of the polar (or cylindrical) basis vectors \(\rhat\) and \(\phat\) at a particular point in a way that details how the direction of these vectors depends on the coordinate \(\phi\) of the point.
- The basis vectors adapted to a single coordinate form a simple example of the geometrical notion of a vector field, that is, a vector at every point in space, see Section 1.20. As an example, Figure 1.26 shows these basis vector fields in polar coordinates.